Development
Octrees
My initial idea was to use an octree for merging and storing voxel
information efficiently, since voxels are well-suited for them, being
uniformly-sized cubes. While subdividing, the octree would check if
all contained voxels are the same color. A subdivision where all
voxels have the same color would stop subdividing and become a leaf
node. This is simple to do because each voxel is simply three unsigned
integers (x, y, z), identifying its place on
the grid and allowing for simple for-loop iteration.
However,
it turned out that this approach was both inefficient for storage and
impossible to completely parallelize. Because the subdivisions of an
octree are cubes, adjacent voxels that are only similar along one or
two dimensions are not merged at all. Also, because each level of
subdivided node requires its parent to be processed first, voxel
merging cannot be parallelized and therefore cannot enjoy the benefits
of SIMD processing.
In hindsight, I should have been able
to predict these drawbacks and shouldn't have gone deep into the
implementation details before confirming that it was the best option.
I won't go into the weeds with this one, but here's the code
if you're curious:
Full-Compute - X/Y/Z Merge
In order for this to be viable in real-time, we need a full-compute
algorithm that utilizes SIMD parallelization at every step possible.
In other words, we should keep the resources used by the algorithm as
shader resources for the entire process, until the new mesh's
vertex/index buffers are populated in
CSVoxelMesh.
Instead of using
octrees to merge similar voxels, a number of parallel loops are
performed to merge voxels along the X-axis, then merge the result
along the Y-axis, and then merge that result along the Z-axis. For
example, if the voxel model is 12x8x4, an X-merge pass will consist of
8*4=32 compute threads, each of which iterate through 12 voxels and
merge similar voxels as they go. This will be followed by a Y-merge
pass on the result and then a Z-merge pass on the Y-merge's
result. This approach succeeds where octrees fail, since one or
two-dimensional strips of similar voxels are always merged, no matter
which axis they align along.
Here's a high-level
outline of the full-compute algorithm described:
-
Initialization
-
Create all global buffers and shader resources necessary for
compute shaders
-
CSVoxelPartition
-
Constant Buffer
-
uint4 points[MAX_PARTITIONS] - Fracture points, can
be any number of points up to MAX_PARTITIONS
-
uint pointCount - Number of fracture points
-
Texture3D<uint4>[MAX_PARTITIONS] UAV - The voxel
grid corresponding to each of the fracture points
-
CSVoxelMerge
-
Constant Buffer
-
uint mergeAxis - Enum indicating which axis to merge
in
-
Texture3D<uint4> UAV - Color region bounds (taken
from C++ after interpreting output from CSVoxelPartition
step)
-
Texture3D<uint4> UAV - Null region bounds (taken
from C++ after interpreting output from CSVoxelPartition
step)
-
CSVoxelMesh
-
Texture3D<uint4> SRV - Color region bounds
(directly from the end of CSVoxelMerge step)
-
Texture3D<uint4> SRV - Null region bounds
(directly from the end of CSVoxelMerge step)
-
Output vertex buffer/index buffer will be created
per-entity
-
Load the voxel grid(s) that will serve as the original model of
the entities in the scene
-
On Fracture
-
CSVoxelPartition (Execute for each
voxel)
-
Of the points given (in constant buffer), find the point
which is closest to this voxel
-
Select the 3D texture corresponding to the closest point
-
Add this voxel to the texture, indicating position and color
index
-
CSVoxelMerge (Execute once for each
X-strip/Y-strip/Z-strip)
-
Merge all color regions in three passes (merge along X,
merge along Y, merge along Z), including null region
-
Texture3D<uint4> maps voxel coords to bounds max, with
w representing the index of the color region - all
consecutive voxels with the same w coordinate are combined
into a single bounding box
-
Put all empty bounds in the null regions texture for future
reference
-
CSVoxelMesh (Execute once for each
color region bounds retrieved after merging)
-
Clip surface faces of this bounding box - for each of 6
faces,
-
Extend bounds in the face direction
-
Clip the extended bounds against all bounds in the null
region
-
Perform simple merging of the resulting set of clipped
bounds for this face
-
Add the clipped bounds to the output vertex buffer - for
each clipped face,
-
Calculate the 4 vertices of the face
-
Optionally check for redundant vertices
-
Determine indices for this face (2 triangles)
-
Append vertices to vertex buffer
-
Append indices to index buffer
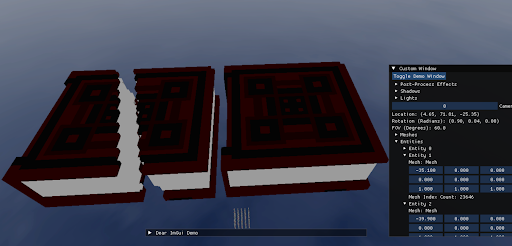
These steps are initiated in the function below. The
Partition and
Merge steps are both done in
PartitionGrid() (the fractureCount parameter
is hard-set to 2 in this case), and the
Mesh step is done upon construction of the
VoxelRenderer component after the fracture is
complete. The CSVoxelCollider step, which is
not completely relevant here, is done upon construction of the
VoxelCollider component.
void VoxelDestructable::Fracture()
{
std::unordered_map<IntVector, VoxelGridComponent*>
fractureGroups = PartitionGrid(2);
Transform* transform =
entity->GetComponent<Transform>();
for(auto& fractureGroup : fractureGroups)
{
Vector groupDir =
voxelGrid->GridCoordsToNormalizedLocalSpace(fractureGroup.first);
Entity* fractureEntity = new Entity();
fractureEntity->AddComponent(new
Transform(transform->GetLocation() + groupDir,
transform->GetRotation(), transform->GetScale()));
fractureEntity->AddComponent(fractureGroup.second);
fractureEntity->AddComponent(new
VoxelRenderer(fractureGroup.second,
ResourceManager::GetMaterial(L"Palette")));
fractureEntity->AddComponent(new
VoxelCollider(fractureGroup.second));
fractureEntity->AddComponent(new Rigidbody(Vector(0,
-9.81f, 0)));
fractureEntity->AddComponent(new
VoxelDestructable(voxelGrid));
EntityManager::AddEntity(fractureEntity);
fractureEntity->GetComponent<Rigidbody>()->SetVelocity(groupDir);
}
EntityManager::DestroyEntity(entity);
}
Here's a more detailed look at the
PartitionGrid() function:
std::unordered_map<IntVector, VoxelGridComponent*>
VoxelDestructable::PartitionGrid(size_t fractureCount)
{
VoxelGridComponent* voxelGridComponent =
entity->GetComponent<VoxelGridComponent>();
/* Generate random grid points and initialize point groups */
std::vector<IntVector> points;
for(size_t i = 0; i < fractureCount; i++)
points.push_back(IntVector::Rand(IntVector::Zero(),
voxelGridComponent->GetDimensions()));
std::unordered_map<IntVector, VoxelGridComponent*>
pointGroups;
for(IntVector point : points)
pointGroups.emplace(point,
new VoxelGridComponent(voxelGridComponent->width,
voxelGridComponent->height, voxelGridComponent->depth));
// Partition this grid into point groups
CS_VoxelPartition(voxelGridComponent, pointGroups);
// Merge the voxels of each of the partitioned grids
for(auto& pointGroup : pointGroups)
{
VoxelGridComponent* voxelGridComponent = pointGroup.second;
VoxelGridComponent::CS_VoxelMerge(
voxelGridComponent->width, voxelGridComponent->height,
voxelGridComponent->depth,
voxelGridComponent->boundsTextureUAV,
voxelGridComponent->colorBoundsBufferUAV,
voxelGridComponent->nullBoundsBufferUAV,
voxelGridComponent->colorBoundsCounterBuffer,
voxelGridComponent->colorBoundsCount,
voxelGridComponent->nullBoundsCounterBuffer);
}
return pointGroups;
}
CS_VoxelPartition() is one of the functions
that run a compute shader using DX11 API calls. All of these functions
are mostly the same, so here's an example from
Partition:
void VoxelDestructable::CS_VoxelPartition(VoxelGridComponent*
voxelGridComponent, std::unordered_map<IntVector,
VoxelGridComponent*> pointGroups)
{
Microsoft::WRL::ComPtr<ID3D11ComputeShader>
computeShader =
ResourceManager::GetComputeShader(L"CS_VoxelPartition");
Microsoft::WRL::ComPtr<ID3D11Buffer> constantBuffer =
ResourceManager::GetConstantBuffer(L"CS_VoxelPartition");
/* UAVs for the output textures are managed by their
respective VoxelGridComponents */
std::vector<IntVector> inputPoints;
std::vector<ID3D11UnorderedAccessView*> outputUAVs;
for(auto& pointGroup : pointGroups)
{
inputPoints.push_back(pointGroup.first);
outputUAVs.push_back(pointGroup.second->GetBoundsTextureUAV().Get());
}
// Pad the rest of the vector with null UAVs
while(outputUAVs.size() < MAX_PARTITIONS)
outputUAVs.push_back(nullptr);
Graphics::Context->CSSetShader(computeShader.Get(),
nullptr, 0);
Graphics::Context->CSSetShaderResources(0, 1,
voxelGridComponent->boundsTextureSRV.GetAddressOf());
Graphics::Context->CSSetUnorderedAccessViews(0,
MAX_PARTITIONS, outputUAVs.data(), nullptr);
Graphics::Context->CSSetConstantBuffers(0, 1,
constantBuffer.GetAddressOf());
/* Dispatch */
{
VoxelPartitionConstants constants = {};
for(size_t i = 0; i < inputPoints.size(); i++)
constants.points[i] = DirectX::XMUINT4(inputPoints[i].x,
inputPoints[i].y, inputPoints[i].z, inputPoints[i].w);
constants.pointCount = inputPoints.size();
D3D11_MAPPED_SUBRESOURCE cbMapped = {};
Graphics::Context->Map(constantBuffer.Get(), 0,
D3D11_MAP_WRITE_DISCARD, 0, &cbMapped);
memcpy(cbMapped.pData, &constants,
sizeof(VoxelPartitionConstants));
Graphics::Context->Unmap(constantBuffer.Get(), 0);
Graphics::Context->Dispatch(voxelGridComponent->width,
voxelGridComponent->height, voxelGridComponent->depth);
}
// Unbind
ID3D11ShaderResourceView* nullSRVs[16] = {};
Graphics::Context->CSSetShaderResources(0, 16,
nullSRVs);
ID3D11UnorderedAccessView* nullUAVs[MAX_PARTITIONS] = {};
Graphics::Context->CSSetUnorderedAccessViews(0,
MAX_PARTITIONS, nullUAVs, nullptr);
}
Future Work
Although I've achieved what I originally aimed for and plan to
migrate this to Vulkan for my game engine (see
this
page for more info), there is more that can be done in terms of
optimization. Specifically, collision interactions between the
fractured meshes are still quite inaccurate and expensive. Even after
adding a CSVoxelCollider stage, the
approximated collision bounds look pretty awkward, and when there are
many meshes close to each other (which is often the case immediately
after fracturing), there's a noticable performance hit. I've
read that this is a common problem in engines and is usually solved by
adding a short period immediately after destruction where collision
detection is disabled.